机器视觉系统关键硬件之一-工业相机(以Dalsa为例)
机器视觉系统是一种模拟人类视觉功能,通过光学装置和非接触式传感器获取图像数据,并进行分析和处理,以实现对目标物体的识别、测量、检测和定位等功能的智能化系统。其目的是让机器能够理解和解释视觉信息,从而做出决策或执行任务。简单来说,机器视觉是用机器代替人眼来做测量和判断。
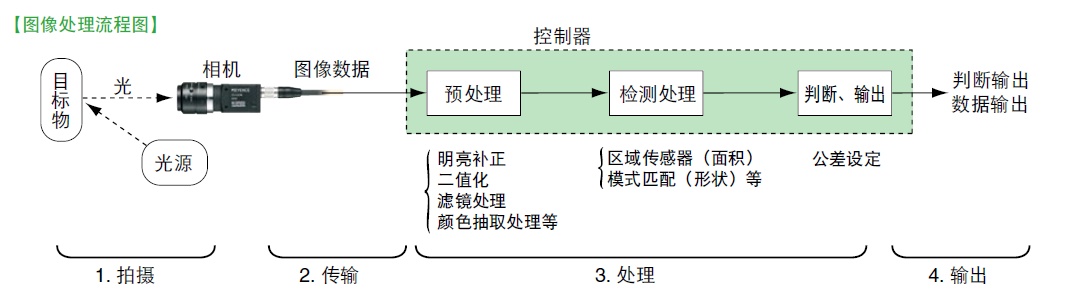
在整个机器视觉系统处理过程中,图像处理贯穿始终。
1.1、工业相机工作原理
图像采集:通过镜头收集被拍摄物体反射或透射的光线,将其聚焦在图像传感器上。
光电转换:图像传感器(常见的有 CCD 和 CMOS)将光信号转换为电信号。以 CMOS 传感器为例,每个像素点都有一个感光二极管,光线照射时产生与光强成正比的电荷,进而被转换为电压信号。
信号处理:转换后的电信号经过放大器进行放大,并通过模数转换器(ADC)将模拟信号转换为数字信号,这些数字信号经过处理后形成数字图像数据,传输给计算机等设备进行后续分析。
1.2、工业相机的主要特点
- 高可靠性:工业相机设计用于长时间连续工作,能够在高温、高湿、震动等恶劣环境下稳定运行。
- 高性能:提供高分辨率、高帧率、高动态范围和高灵敏度,满足精密检测和高速捕捉的需求。
- 模块化设计:工业相机通常采用模块化设计,便于集成到各种工业设备和系统中。
- 丰富的接口:支持多种接口类型(如GigE、USB3.0、Camera Link、CoaXPress等),满足不同带宽和距离的需求。
- 灵活的配置:支持多种触发模式、曝光控制和图像处理功能,适应不同的应用场景。
1.3、工业相机的分类
- 按图像传感器类型:分为 CCD工业相机和 CMOS工业相机。
- 按输出色彩:分为彩色工业相机和黑白(单色)工业相机。
- 按扫描方式:面阵工业相机和线阵工业相机。
- 按输出信号方式分:模拟工业相机、数字工业相机。
- 按响应频率范围分:可见光(普通)相机、红外相机、紫外相机等。
- 按照光谱波段数量来分,可分为高光谱相机和多光谱相机。
- 按照成像维度分:2D工业相机和3D工业相机
- 特殊工业相机:偏振工业相机。
1.3.1CCD 相机和 CMOS 相机
工业相机主要基于CCD(电荷耦合器件)或CMOS(互补金属氧化物半导体)芯片。CCD是目前机器视觉中最常用的图像传感器,它集光电转换、电荷存贮、电荷转移和信号读取于一体,是典型的固体成像器件。CMOS图像传感器则将光敏元阵列、图像信号放大器、信号读取电路、模数转换电路、图像信号处理器及控制器集成在一块芯片上。两者在性能和应用方面各有优势:
CCD 相机成像质量高,噪声低,在低光照环境下表现出色,但成本较高、功耗大,用于要求高图像质量和低噪音的应用;CMOS 相机成本低、功耗低、数据读取速度快,不过图像质量相对略逊一筹,适用于高速和低功耗应用。
1.3.2黑白和彩色相机
黑白工业相机直接将光强信号转换成图像灰度值,生成的是单色灰度图像。彩色工业相机能获取景物中红、绿、蓝三个分量的光信号,输出彩色图像。彩色相机能够提供比黑白相机更多的色彩信息。
彩色相机能获取物体丰富的色彩信息,适用于对颜色有要求的检测,如食品外观检测、印刷品色彩检测等;黑白相机则对光线更敏感,在检测物体的灰度差异、纹理细节方面表现较好,常用于对精度要求高的尺寸测量、缺陷检测等场景。
1.3.3面阵和线阵相机
面阵相机是每次采集若干行的图像并以帧方式输出。其应用面较广,如面积、形状、尺寸、位置,甚至温度等的测量。面阵相机的优点是可以获取二维图像信息,测量图像直观。缺点是像元总数多,而每行的像元数一般较线阵少,帧速度受到限制。
线阵工业相机,顾名思义是成像传感器呈“线”状的。虽然也是二维图像,但极宽,几千个像素的宽度,而高度却只有几个像素的而已。线阵工业相机具有高扫描频率和高分辨率。其典型应用领域是检测连续的材料,例如金属、塑料、纸和纤维等。被检测的物体通常匀速运动, 利用一台或多台工业相机对其逐行连续扫描,以达到对其整个表面均匀检测。可以对图像逐行进行处理,或者对由多行组成的面阵图像进行处理。另外线阵工业相机非常适合测量场合,这要归功于传感器的高分辨率。一般在两种情况下使用这种相机:
1. 被测视野为细长的带状,多用于滚筒上检测的问题。
2. 需要极大的视野或极高的精度。
面阵相机一次获取一帧完整图像,适用于静态物体或运动速度较慢的物体检测;线阵相机每次获取一行图像,通过物体与相机的相对运动来构建完整图像,常用于高速运动物体的检测和高精度的一维测量,如印刷品的在线检测、金属板材的表面检测等。
1.4主要参数计算
(1)分辨率(Resolution)
定义:相机每次采集图像的像素点数,由相机所采用的感光芯片分辨率决定,是芯片靶面排列的像元数量(即像素数)。
影响:在采集图像时,相机的分辨率对图像质量有很大的影响。在对同样大的视场(景物范围)成像时,分辨率越高,对细节的展示越明显。
表示方法:通常面阵相机的分辨率用水平和垂直分辨率两个数字表示,如1920(H)x1080(V),前面的数字表示每行的像元数量,即共有1920个像元;后面的数字表示像元的行数,即1080行。线阵相机的分辨率通常表示多少K,如1K(1024)、2K(2048)、4K(4096)等。
总像素数 = 水平像素数×垂直像素数
例如:1920×1080 = 2,073,600 像素(约200万像素)
(2)像素深度(Pixel Depth)
定义:即每像素数据的位数,一般用多少比特位表示。
影响:像素深度决定了图像灰阶的丰富程度。比特位数越多,表达图像细节的能力越强,灰阶值更加丰富、分得更细。但数据量也越大,可能影响系统的图像处理速度。
常见值:一般常用的是8Bit,对于数字相机还会有10Bit、12Bit、14Bit等。
(3)最大帧率/行频(Frame Rate/Line Rate)
定义:相机采集传输图像的速率。
表示方法:通常帧率是相对于面阵工业相机来说的,单位是fps(Frame Per Second),如181fps,即相机每秒内最多可采集181帧图像。行频是相对于线阵工业相机来说的,单位是kHz,如80kHz,即相机每秒内最多可采集80000行图像数据。
影响:帧率/行频越高,相机在单位时间内采集的图像数量越多,适用于需要快速捕捉动态图像的场景。
计算方法:帧率=3×目标速度/横向视野;行频=运动速度/实际精度=运动速度×分辨率/视野。
根据应用场景中物体运动速度来确定所需帧率。假设物体运动速度为V(单位:mm/s),相机曝光时间为T(单位:s),在曝光时间内物体移动的距离不能超过一个像素尺寸P(单位:mm),则帧率F可由下式计算:F=1/T,其中T≤P/V。
(4) 曝光方式和快门速度(Exposure and Shutter Speed)
曝光方式:对于线阵相机,通常是逐行曝光的方式;面阵相机则有帧曝光、场曝光和滚动行曝光等几种常见方式。
快门速度:一般可到10微秒,高速相机还可以更快。快门速度越快,相机捕捉图像的能力越强,适用于光线变化快或运动物体拍摄的场景。
(5)像元尺寸(Pixel Size)
定义:像元是组成数字化影像的最小单元,像元尺寸大小和像元数(分辨率)共同决定了相机靶面的大小。
常见值:工业相机像元尺寸一般为3μm~14μm。
影响:像元尺寸越大,能够接收到的光子数量越多,在同样的光照条件和曝光时间内产生的电荷数量越多,图像质量可能越高。但像元尺寸越小,制造难度越大。
计算:与分辨率和相机传感器尺寸相关。例如已知传感器的尺寸为Sa×Sb(水平尺寸×垂直尺寸,单位为mm),相机分辨率为Na×Nb,则像素尺寸P(假设像素为正方形)为:P=Sa×1000/Na=Sb×1000/Nb。
(6)光谱响应特性(Spectral Range)
定义:指该像元传感器对不同光波的敏感特性。
常见范围:一般响应范围是350nm~1000nm。一些相机在靶面前加了一个滤镜,滤除红外光线。如果系统需要对红外感光,可去掉该滤镜。
(7)接口类型(Interface Type)
常见类型:有Camera Link接口、以太网接口、1394接口、USB接口输出等。目前最新的接口有CoaXPress接口。
影响:接口类型决定了相机与图像处理系统或其他设备之间的数据传输方式。选择合适的接口类型可以确保数据传输的稳定性和速度。
(8)传感器尺寸
定义:相机传感器的物理尺寸,通常以英寸(如1/2.3")或毫米(如12.8mm×9.6mm)表示。
计算方法:
传感器尺寸通常由制造商提供,但可以通过像素尺寸和分辨率推算:
传感器宽度 = 水平像素数×像素尺寸
传感器高度 = 垂直像素数×像素尺寸
以Dalsa相机为例,查看G5-GM30-M2450其相关参数。

- 随机文章
- 热门文章
- 热评文章
- (乡村行·看振兴)江西铅山果蔬飘香 奏响产业致富曲,(乡村行·看振兴)江西铅山果蔬飘香 奏响产业致富曲
- 外交部:坚决反对任何国家以“航行自由”为名进行挑衅,外交部:坚决反对任何国家以“航行自由”为名进行挑衅
- 智能机器人企业为何看向合肥?这场对接会给出答案,智能机器人企业为何看向合肥?这场对接会给出答案
- “黑科技”组合赋能新疆不停电作业,“黑科技”组合赋能新疆不停电作业
- (乡村行·看振兴)土鸡坐上无人机 江西南康“空中快递员”助振兴,(乡村行·看振兴)土鸡坐上无人机 江西南康“空中快递员”助振兴
- 港交所庆祝成立25周年,港交所庆祝成立25周年
- 番茄小说探索融合出版:与近400家出版社合作,电子出版物日活用户超千万,番茄小说探索融合出版:与近400家出版社合作,电子出版物日活用户超千万
- [快讯]戈碧迦公布2024年年度分红实施方案
- 能守住3400点就是胜利
- 夏厦精密(001306):上海市锦天城律师事务所关于浙江夏厦精密制造股份有限公司2025年限制性股票激励计划(草案)的法律意见书
- 机构强烈推荐3只个股-更新中
- 2公司获得推荐评级-更新中
- 华西股份(000936):第九届董事会第九次会议决议
- 1中国区域电力国企深度研究报告:绿色转型与 AI 算力新机遇
- 2负荷波动难预判?分布式能源难统筹?智慧能源系统直击新型配电网核心难题!
- 3电源测试系统:高压性能二合一,高效测试新选择
- 4“刻骨铭心——甲骨文化展”在广西桂林开幕,“刻骨铭心——甲骨文化展”在广西桂林开幕
- 5中国首创 “蒸笼” 法,蒸出高性能 “黄金半导体”
- 6AI产业链掘金潮蔓延:OCS概念股爆发 这些“头号玩家”已率先进场
- 7“名家讲经典——李洱:从《一千零一夜》说起” 活动举办,“名家讲经典——李洱:从《一千零一夜》说起” 活动举办
- 8安科瑞ANAPF有源电力滤波器:实时谐波动态治理与无功补偿,提升半导体厂房配电系统稳定性
- 9骨传导耳机,会戴出头晕恶心?这些人群不适合佩戴→
- 10(寻味中华|非遗)蒙古族搏克:摔跤之力在腰,决胜之智在心,(寻味中华|非遗)蒙古族搏克:摔跤之力在腰,决胜之智在心
- 11海默科技(300084):披露权益变动报告书的提示性公告
- 12隋唐长安城通义坊遗址发现多种陶瓷器 或为贵族生活用器,隋唐长安城通义坊遗址发现多种陶瓷器 或为贵族生活用器
- 13结题材料不合格,只因订书钉没用不锈钢?
- 12025年廊坊经洽会:小箱包“圈粉”大咖 县域特色产业快速出海,2025年廊坊经洽会:小箱包“圈粉”大咖 县域特色产业快速出海
- 2宇树科技完成C轮融资 注册资本增至3.64亿,宇树科技完成C轮融资 注册资本增至3.64亿
- 3第六届西部数博会文旅“黑科技”破壁虚实,第六届西部数博会文旅“黑科技”破壁虚实
- 4四川乐山:餐饮行业大咖齐聚共绘美食产业新蓝图,四川乐山:餐饮行业大咖齐聚共绘美食产业新蓝图
- 5黑龙江省水运口岸首次进口铜矿粉 “铁水联运”激活跨境物流新引擎,黑龙江省水运口岸首次进口铜矿粉 “铁水联运”激活跨境物流新引擎
- 6全球乳业大会开幕!伊利作为亚洲乳企代表受邀出席,斩获世界乳品创新奖,全球乳业大会开幕!伊利作为亚洲乳企代表受邀出席,斩获世界乳品创新奖
- 7河南粮食重点领域贷款余额超2595亿元,河南粮食重点领域贷款余额超2595亿元
- 8廊坊经洽会观察:跨境电商如何赋能产业出海?,廊坊经洽会观察:跨境电商如何赋能产业出海?
- 92025夏季达沃斯实现全绿色用能 减排二氧化碳约600吨,2025夏季达沃斯实现全绿色用能 减排二氧化碳约600吨
- 10上合组织国家留学生探访山东青岛体验“智造”魅力,上合组织国家留学生探访山东青岛体验“智造”魅力
- 11浙江加速城乡融合高质量发展步伐,浙江加速城乡融合高质量发展步伐
- 12合肥推动“车机人”协同计划 打造聚合型智能产业集群,合肥推动“车机人”协同计划 打造聚合型智能产业集群
- 13(活力中国调研行)百年高炉遇见未来 北京科幻产业加速跑,(活力中国调研行)百年高炉遇见未来 北京科幻产业加速跑









 乐乐法
乐乐法